聚沃科技电机驱动板简介 写在前面:聚沃科技电机驱动板采用FOC三电阻采样方式,实现了霍尔传感器模式和无传感器模式,其中霍尔传感器模式分为霍尔相序检测和霍尔控制电机转动,无传感器模式采用了非线性磁链观测器进行速度位置观测。本电机驱动板可搭配GD32F303红枫派开发板使用,可实现电机正反转控制、霍尔传感器模式和无传感器模式以及电机调速等功能。 技术文档 2024年06月21日 1 点赞 0 评论 114 浏览
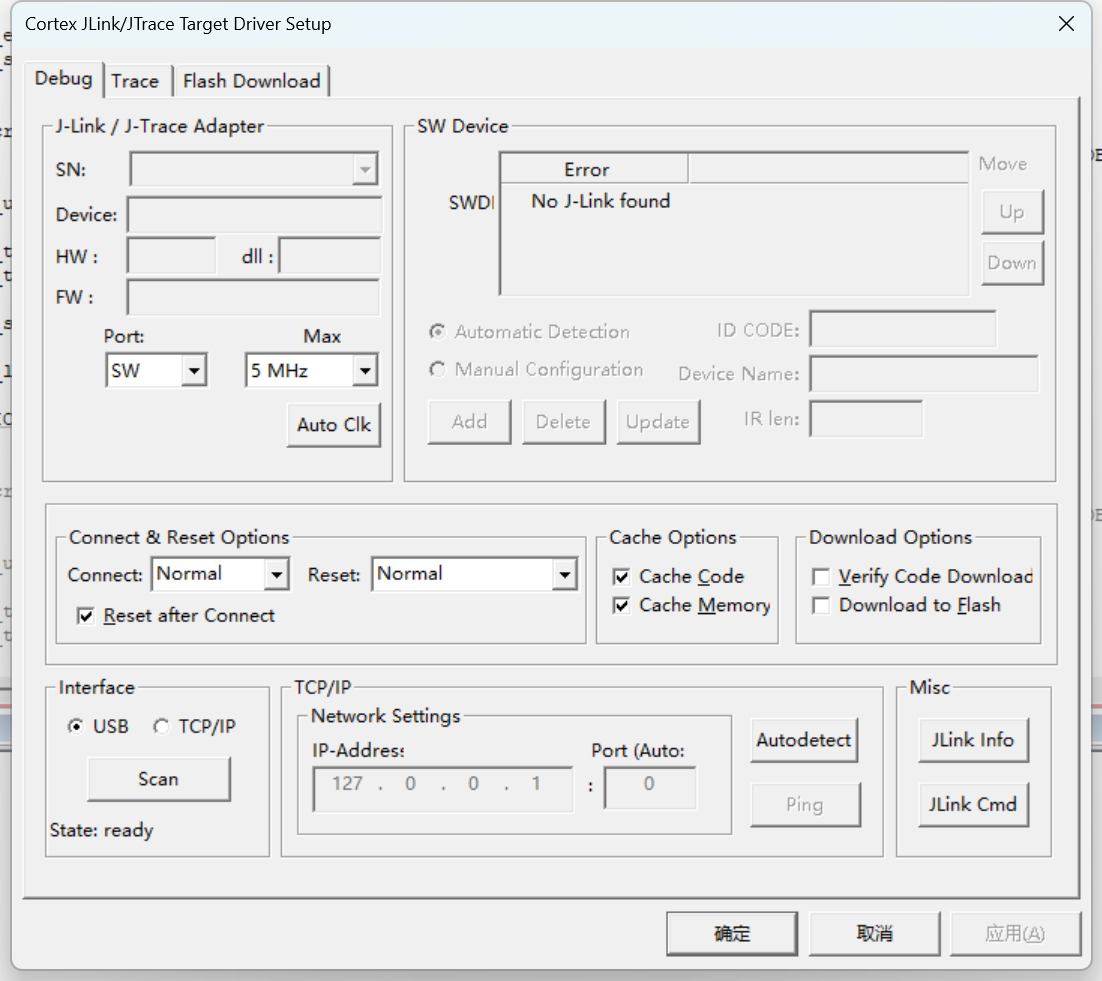
海棠派H7开发板仿真器连接不上该怎么办? 很多小伙伴第一次使用GD的H7,出现很多仿真器连接不上的问题,下面介绍一下遇到的问题和解决方案。 技术文档 2024年05月24日 0 点赞 0 评论 203 浏览
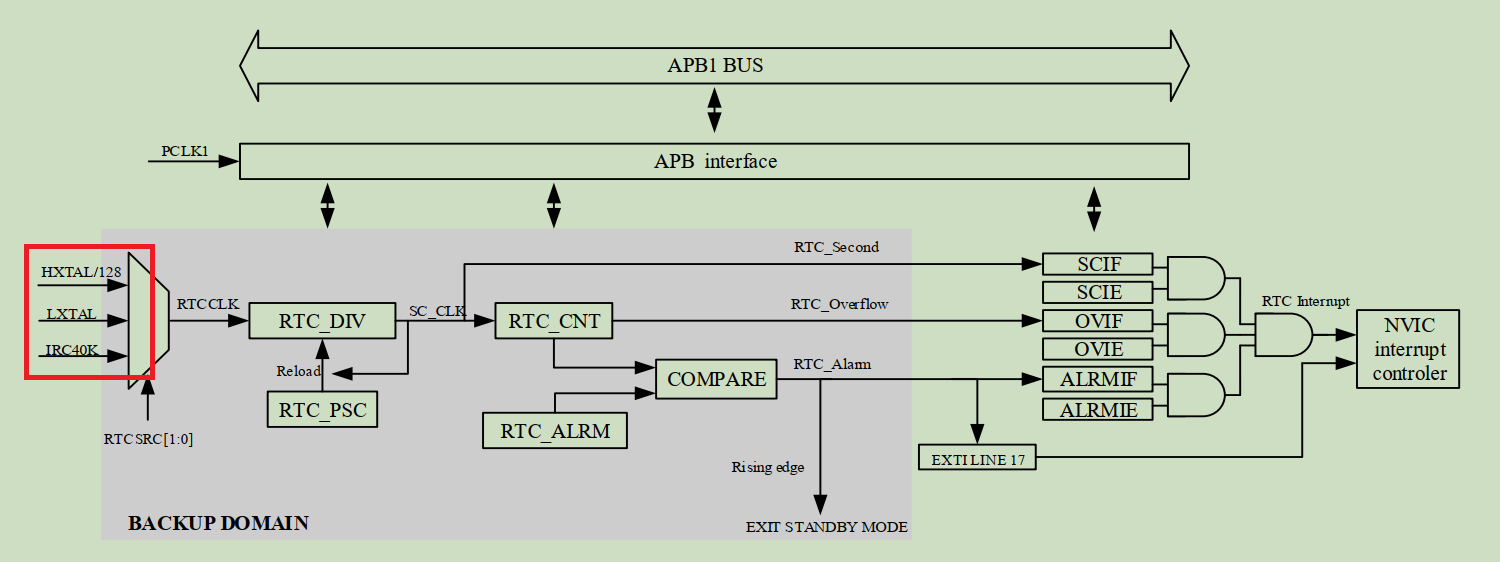
RTC碰到LXTAL低频晶振停振怎么办? GD32F303的RTC模块框图如下图所示,RTC时钟源可选择HXTAL/128、LXTAL或IRC40K,一般为了实现更精准的RTC时间,MCU系统均会外挂32.768KHz LXTAL低频晶振,但由于低频晶振负阻抗较大,不容易起振,若外部电路布线、匹配电容选择以及驱动模式配置不合适,可能会存在启动或运行过程中LXTAL停振的风险,当LXTAL停振后,RTC将会面临时间停止的状况,此时我们应该如何处理? 技术文档 2024年03月29日 0 点赞 0 评论 312 浏览
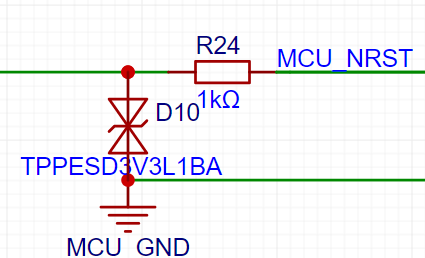
ESDEOS防护怎么做效果最好?为什么加了TVS的芯片IO口还是被浪涌烧了? 前面讲解过如何防止热插拔烧坏单片机 和芯片烧坏时发生了什么?为什么总是VDD短路?甚至封装开裂冒烟? 很多网友热烈讨论,其中大家最常用和惯性的经验就是GPIO防护使用TVS。 技术文档 2024年03月21日 0 点赞 0 评论 209 浏览
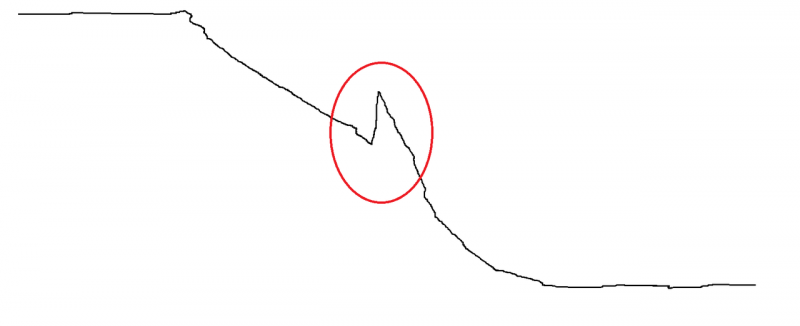
EXTI外部中断在错误的边沿误触发是可能什么原因? 大家在进行MCU项目开发时是否碰到过EXTI外部中断在错误的边沿误触发的情况?比如EXTI配置的为下降沿触发,实际情况在个别上升沿的时候也被误触发了。 技术文档 2024年03月21日 0 点赞 0 评论 177 浏览
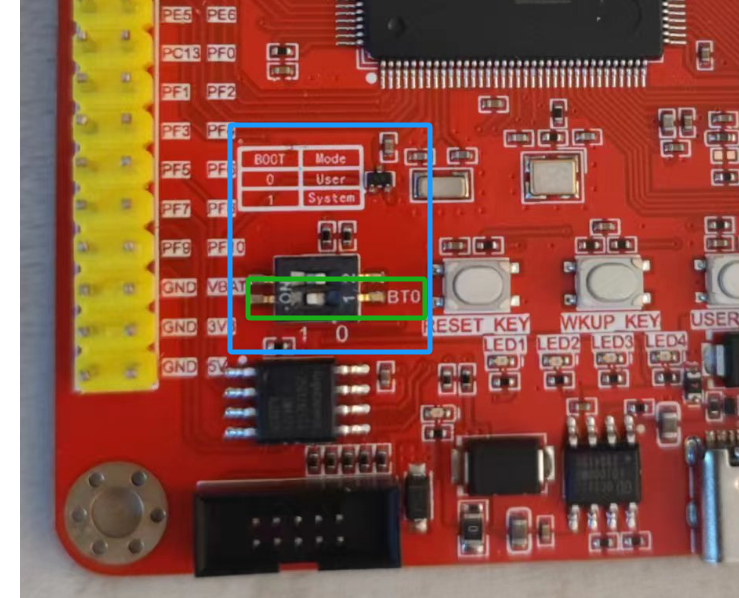
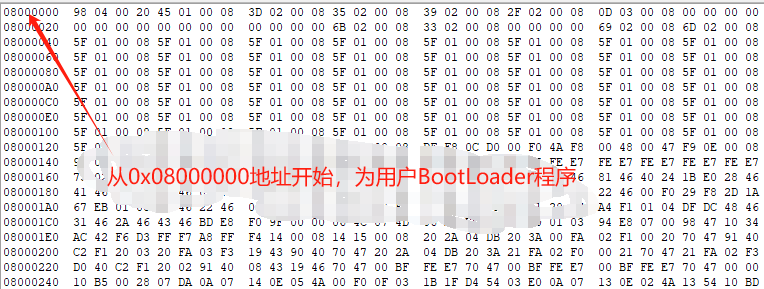
什么是ISP?什么是IAP? 做单片机开发的工程师经常会听到两个词:ISP和IAP,但新手往往对这两个概念不是很清楚,今天就来和大家聊聊什么是ISP,什么是IAP? 技术文档 2024年03月21日 0 点赞 0 评论 228 浏览
节省IO的小技巧:GD32 MCU如何使用一个GPIO实现串口半双工收发 一般情况串口的接受和发送分别需要使用TX和RX两个引脚来实现,但在一些UART的实际应用中,通信双方身份为主机和从机,数据流是半双工的,那么当IO口资源紧张时可以使用半双工模式通过一个引脚实现数据的发送和接受,同时又保证数据不出错。我们一起来看下红枫派开发板例程中是如何实现的? 技术文档 2024年03月15日 0 点赞 0 评论 178 浏览